AutoTRASSIR setting aims to selecting the detector's working mode and defining the size of objects and recognition borders. All other parameters are integrated into the neural network, which detects license plates and recognizes test on them.
Detector
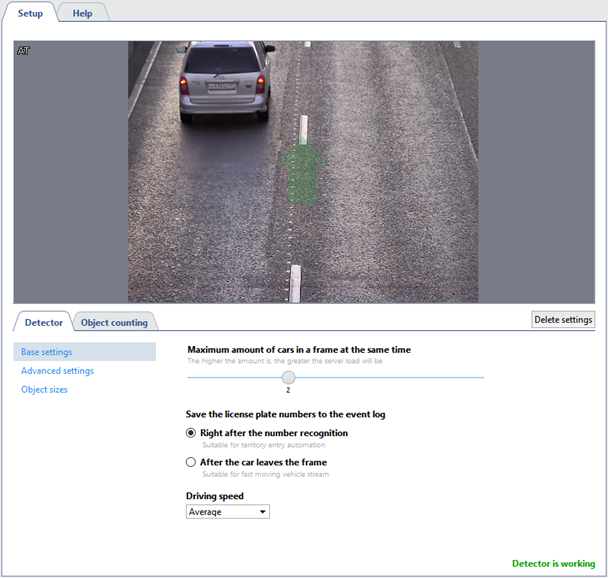
Set up the following parameters in the Base settings on the Detector tab:
-
Maximum amount of cars in a frame at the same time - the maximum amount of cars, which can be detected by the detector at the same time in a frame. As a rule this value is set depending on the amount of the lanes in a frame. The higher the value is, the greater is the server load.
-
Save the license plate numbers to the event log - sets the saving mode of the recognized license plate numbers to the log. It is selected depending on the required detection:
Right after the number recognition - In this case AutoTRASSIR fixes the license plate number right after the vehicle appears in a frame and saves it to the log when it is recognized with the greatest extent of confidence. It suits for slowly moving or standing vehicles.
After the car leaves the frame - in this mode AutoTRASSIR tries to recognize the license plate number when the vehicle is in a frame and fixes the number when the car leaves the frame. It will suit if the maximum precision of license plate number detection in the fast moving traffic flow is required.
-
In the Driving speed dropdown list select the traffic speed in a frame. The higher the selected speed is, the more often the detector triggers and the greater is the server load:
- Stationary - standing or very slow moving vehicle, such as a car approaching an auto barrier.
- Very slow - up to 10 km/h.
- Slow - up to 20 km/h.
- Average - up to 30 km/h.
- Fast - up to 200 km/h.
- Highest possible - detector will trigger at each frame.
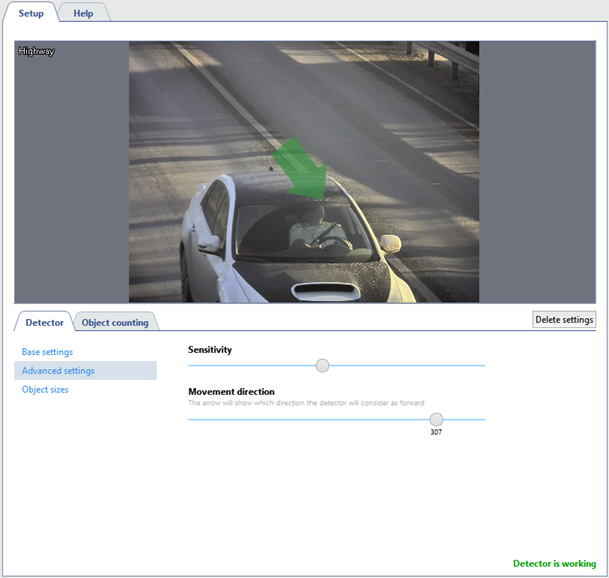
The Advanced settings area lets you set the following parameters:
-
The Sensitivity parameter sets the level of confidence which is used during the license plate recognition and is defined depending on the detection requirements. The lesser the value is, the lesser is the probability of the detector false triggerings.
-
The Movement direction parameter sets the direction of the traffic flow, which the detector will take as the direct movement. The direction is indicated by the green arrow on video and the slider shows the value.
-
The Duplicate detection filter parameter lets you eliminate repeated detections of the same license number if it has been previously recognized. The repeated detections may occur when the recognized license plate number disappears and then reappears in the frame, e.g. when it is hidden by another car. Select the time interval during which the recognized license plate number will not be detected repeatedly by the module.
-
The Analyze the lower part of the vehicle parameter lets you prevent the detector triggering on the inscriptions located on the body of the shell. This setting allows you to set the license plate area more accurately.
Tip
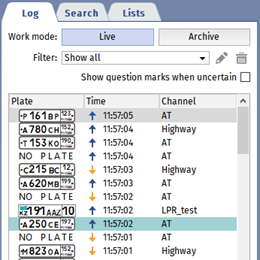
In the AutoTRASSIR log the movement in the direction of the green arrow is indicated by up arrow and the oncoming direction - by the down arrow. You can read more about recognized license plate number review in the License plate recognition andFiltering current license plates sections of the Operator's Guide.
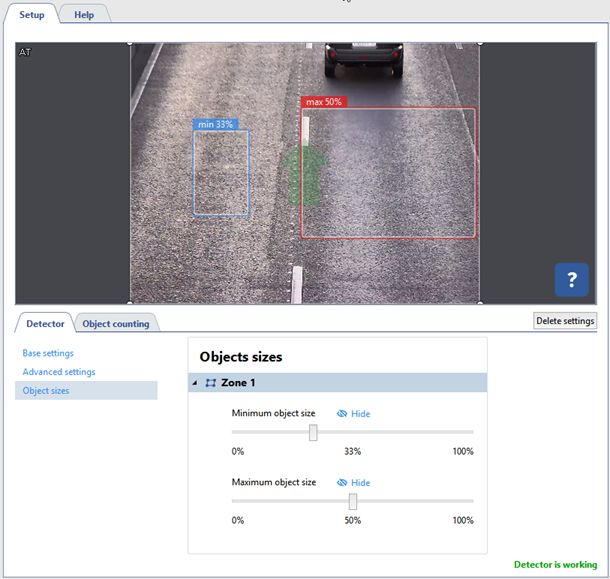
The Object sizes area lets you create a zone in which the vehicles will be detected. With the help of Minimum object size and Maximum object size parameters set the minimal and maximal sizes of the detected objects.
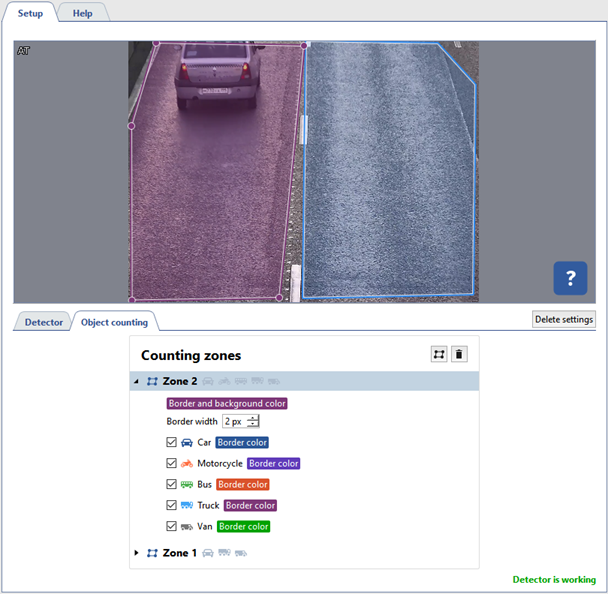
Object counting
The Object counting tab lets you set the zones, in which the vehicles will be detected and specify their borders. In order to create a new counting zone press  and set its vertices. Left click on the zone starting point or press CTRL+ENTER to finish the zone drawing.
and set its vertices. Left click on the zone starting point or press CTRL+ENTER to finish the zone drawing.
Tip
Both traffic lanes and the adjacent territories can be taken as counting zones. You can create a zone of any form to avoid objects causing the false triggerings, such as parked cars.
You can check the setting correctness in the operator's interface.
